A consistent and long-term mapping approach for navigation
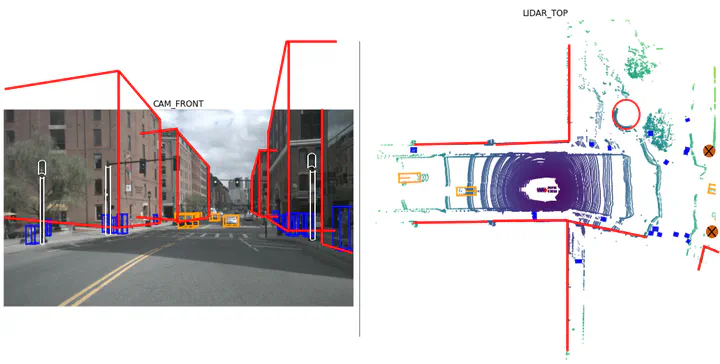 The illustration of the proposed mapping approach
The illustration of the proposed mapping approachAbstract
The construction and maintenance of a robocentric map is key to high-level mobile robotic tasks like path planning and smart navigation. But the challenge of dynamic environment and huge amount of dense sensor data makes it hard to be implemented in a real-world application for long-term use. In this paper we present a novel mapping approach by incorporating semantic cuboid object detection and multi-view geometry information. The proposed system can precisely describe the incremental 3D environment in real-time and maintain a long-term map by extracting out moving objects. The representation of the map is a collection of sub-volumes which can be utilized to perform pose graph optimization to address the challenge of building a consistent and scalable map. These sub-volumes are first aligned by localization module and refined by fusing the active volumes using co-visible graph. With the proposed framework we can obtain the object-level constraints and propose a consistent obstacle mapping system combining multi-view geometry with obstacle detection to obtain robust static map in a complex environment. Public dataset and self-collected data demonstrate the efficiency and consistency of our proposed approach.
Type
Publication
International Journal of Robotics and Automation Technology
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software.
Create your slides in Markdown - click the Slides button to check out the example.
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.