UGV_Stereo
The project aims to develop and implement a high speed stereo vision system and apply it onto unmanned ground vehicles (UGV) with multi-sensor fusion with deep neural network. The method uses bird’s-eye view representation space to preserve both geometric and semantic information.
Project Page: https://ugv_stereo.gitlab.io/
Some video demos are available on Google Drive.
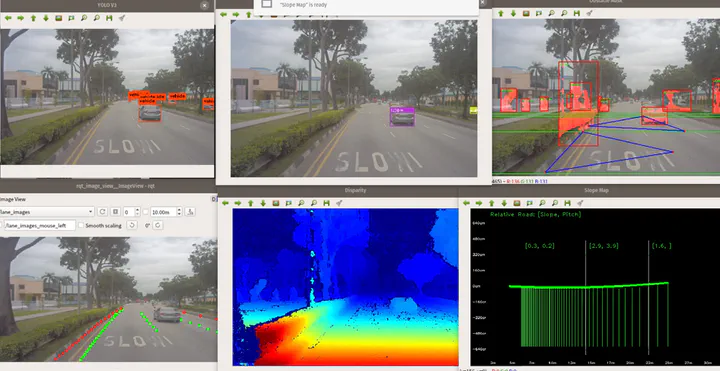
The project consists of three main parts: visual inertial SLAM, 3D reconstruction and tracking, and lane detection. Visual inertial SLAM is used to estimate the pose of the camera and the 3D map of the environment. The 3D reconstruction and tracking part is based on the 3D reconstruction algorithm, which is used to reconstruct the 3D scene. The lane detection part is based on the lane detection algorithm, which is used to detect the lane. The project is implemented in C++ and ROS.