About Me
Dr. Zhang Handuo is currently the AI Scientist at Shanda Group leading a group of 4 AI engineers within the Watt Innovative dev group. My research interests include Vision-language Model development, Robot Perception and Computer Vision. Currently I am working on orchestrating LLM apps and various APIs to streamline complex workflows with an RAG engine and multi-agent framework.
- Vision-Language Models (VLMs) Finetuning and Prompting
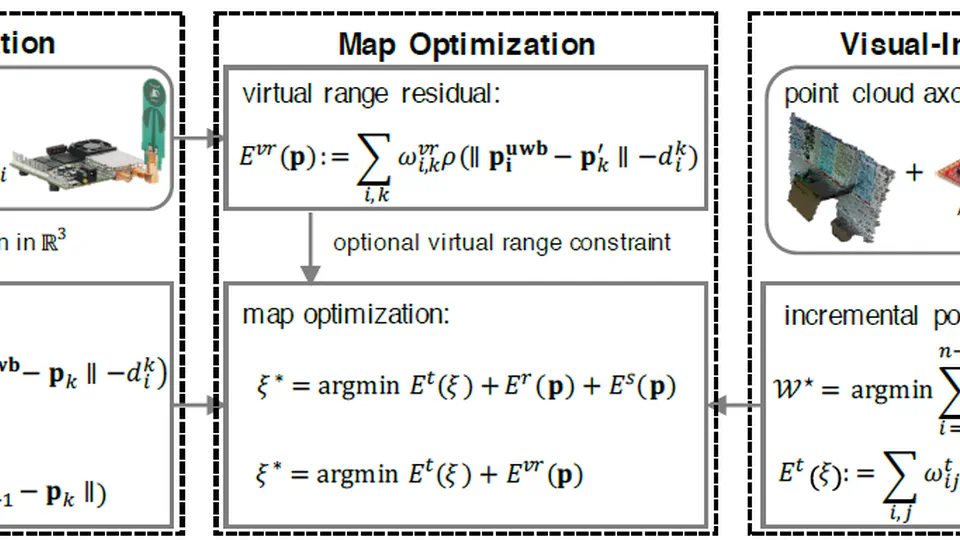
- 3D Machine Perception and Scene Mapping & Understanding
- Visual SLAM and Navigation (Deep Feature Localization and Description)
PhD Robot Vision
Nanyang Technological University
MEng Pattern Recognition and Intelligent System
Northeastern University
BSc Automation & Control Engineering
Northeastern University
I’m a research scientist in the Watt Group at Shanda Group (盛大集团). My research interests lie at the intersection of artificial intelligence, robotics, and 3D vision. I am particularly interested in developing vision-language models (VLMs) for finetuning and prompting, 3D machine perception and scene mapping & understanding, and visual SLAM and navigation. I received my PhD in Robot Vision from Nanyang Technological University in 2021.
Please reach out to collaborate 😃


🧠 Memory Definition in LLM Applications
The ultimate goal is to generate personalized models. The actual work involves reverse engineering, using data generated by the model to infer the model itself. The model and training data are equivalent; the model is a compression of the training data. To achieve the ultimate goal, the model must be capable of on-device real-time learning, requiring a breakthrough in the current training -> inference paradigm. Training and inference must be integrated, with two core challenges - real-time updates (incremental training) and de-averaging individual data. The mid-term goal is to layer individual data (long-term memory) on top of a foundational model (pre-trained LLM).
Seq2seq Model with Attention
Sequence-to-sequence models are deep learning models that have achieved a lot of success in tasks like machine translation, text summarization, and image captioning.
How to remotely edit your project without having to use VIM
Remotely editing your work when your server does not have public IP address and you don’t want to spend any money is not so easy. Maybe you can use Team viewer or Anydesk or even chrome remote desktop, but there are high latencies.
You only look once (YOLO) -- (2)
YOLO has higher localization errors and the recall (measure how good to locate all objects) is lower, compared to SSD. YOLOv2 is the second version of the YOLO with the objective of improving the accuracy significantly while making it faster.
Pooling Layer in CNN (1)
Today I didn’t have the mood to continue my work on map merging of different cameras. So I read the paper from DeepMind of Learned Deformation Stability in Convolutional Neural Networks recommended by Wang Chen.
SVO相关问题
ORBSLAM vs SVO SVO (单目) 优点: 速度极快,100多帧,在低端计算机上也能达到实时性。追踪和建图两个线程,追踪线程和ptam或者orbslam很像,也是建立误差项,然后refine和BA,区别就是用的直接法的Image alignment而不是特征点几何位置信息。 缺点:只是里程计,没有后端优化和回环检测,所以累计误差较大,而且一旦丢了就挂了,没法重定位; 而且在设计的时候针对的是俯视的无人机摄像头,对于平视的摄像机效果很差; 拥有直接法的所有缺点:怕光照变化,怕模糊,怕大运动 svo还有一个不是缺点的缺点,它开源的代码有好多好多坑,作者很多私货故意没有写进开源的代码里面,所以实际用的时候有很多问题,需要自己根据情况改进。 OrbSLAM 优点:支持单目,双目,RGBD,是一个完整的系统,包含了里程计,特征点建图BA,回环检测三个独立线程,在i7上大概15~20hz(跟输入图像大小以及参数设置有关),精确度在近年来属于比较高的了。综合能力最强。 缺点:ORB的提取以及match耗时较大,过快的旋转可能会丢失。而且因为三个线程会给CPU带来较大负担,基本没办法再跑其他大型算法了。对于场景特征点丰富要求高,某些场景如果没什么特征可能就会失败或者不准确。 能够跟orbslam pk的是比较新的DSO算法,SVO除了速度基本各个方面被吊打。 Depth acquirement 先说svo的深度滤波器,属于渐进式的三维重建,不是单纯的求取keypoint的深度,而是要维护候选点seed的深度分布,从未知到粗略到收敛,收敛了才放到地图中共追踪线程使用。实际上收敛较慢,结果严重依赖于准确的位姿估计,因此相比于特征点法的BA没有什么优势。 2)再说orbslam的BA,相比来说计算量更大,但是因为是frame-frame以及local map的两次优化,精确度应该高于svo的滤波器。 灰度不变性假设 灰度值不变是很强的假设。如果相机是自动曝光的,当它调整曝光参数时,会使得图像整体变亮或变暗。光照变化时也会出现这种情况。特征点法对光照具有一定的容忍性,而直接法由于计算灰度间的差异,整体灰度变化会破坏灰度不变假设,使算法失败。 svo不直接取某一个像素,而是4x4的patch,我们对多个点进行最小化光度误差来计算的。所以没有明确的threshold,如果某一两个点光照发生变化还好,少数服从多数。如果发生微小变化了,但是只要选取的特征区域的光照跟其他区域区别很大,也是可以忍受的,毕竟最小化而不强求光照的误差为0。所以说有一定的鲁棒性,虽然跟特征点法没法比。 VO静止的时候,会漂吗 一般情况下VO一般不会漂的 如果是VIO的话是有可能的,一般有几个原因: calibration做的不够准 初始化的时候摄像头尽量冲着特征点丰富的地方,并缓慢移动摄像头,充分初始化 IMU如果质量不好也会轻微的漂,但是不严重